Postprocessing v mobilnim mapovani krajiny
Main menu:
Globální navigační systémy
Text práce
3.1. Základy GNSS
Již z nadpisu je patrné, že se nejedná pouze o jeden systém, ale existuje jich hned několik. Co ale vlastně je globální navigační systém? Význam slov ‚globální' a ‚systém' je v dnešní době všem dobře znám. Definici pojmu navigace podává Rapant(18): Navigací je označováno cílevědomé vedení osob a dopravních prostředků z jednoho místa na druhé po předem vytyčené trase. Nejpoužívanější anglickou zkratkou pro globální navigační systém je GPS.
Výchozí podmínkou pro navigování je určení polohy. Způsobů je mnoho, ale my se zaměříme pouze na určení polohy pomocí družic, kterého využívají navigační systémy (GPS/NAVSTAR, GLONASS a další), protože samotné určování polohy je stěžejní částí této práce. Při postprocessingu se zpřesňuje každý naměřený bod, každá naměřená poloha.
3.1.1. Struktura
Družicový polohový systém se skládá ze tří částí, kosmické, řídící a uživatelské. Pro pojmenování těchto částí se často užívá termínu segment. Kosmický segment tvoří soustava umělých družic Země obíhajících po předem definovaných oběžných drahách, které zajišťují nejlepší možné rozmístění družic. Řídící segment se skládá z pozemních stanic, které monitorují signál družic a vyhodnocují jejich chování, na jehož základě určují stav družic a vypočítávají různé korekční parametry. Mohou rovněž měnit dráhu družic, vykonávají jejich údržbu a řídí celý pozemní a kosmický segment. Vzhledem k převažujícímu účelu rozlišujeme tři základní typy pozemních stanic. Monitorovací stanice přijímají signály družic a předávají je do hlavní řídící stanice. Jsou rozmístěny tak, aby pokud možno neustále viděly všechny družice. V hlavní řídící stanici, které jsou zpravidla dvě, z nichž jedna je záložní, se zpracovávají signály z monitorovacích stanic. Na základě těchto dat se provádí modelování chování kosmického segmentu a následné určování korekcí parametrů oběžných drah a atomových hodin. Výsledky jsou předávány do stanic pro komunikaci s družicemi, což je třetí typ pozemní stanice. Zde dochází k přenášení nově určených parametrů zpět k družici a také k jejímu ovládání. Tyto stanice jsou zpravidla totožné s monitorovacími stanicemi. Poslední částí je uživatelský segment, který je tvořen zařízeními schopnými přijímat a zpracovávat signál z družic na uživatelské úrovni. Na rozdíl od řídícího segmentu se jedná pouze o pasivní příjem signálu(18).
3.1.2. Princip měření
Určování vzdálenosti, což je hlavní prvek při výpočtu polohy, se používají především následující tři principy. Princip kódového měření je určení vzdálenosti přijímače od družice za použití dálkoměrných kódů. Přijímač zjistí čas odeslání a příjmu kódu a z časového rozdílu a rychlosti šíření radiových vln určí tzv. zdánlivou vzdálenost družice. Skutečná vzdálenost se může lišit až o dvě procenta, což je zapříčiněno nepřesností hodin na straně přijímače. Při zanedbání vnějších vlivů by bylo možné dosáhnout přesnosti řádově na centimetry.
Na odlišném principu jsou založena fázová měření, která zpracovávají vlastní nosné vlny. Přijímač spočítá počet vlnových délek na trase mezi družicí a přijímačem. Tento počet se skládá ze dvou částí: počet celých vln, který se určuje velmi obtížně a desetinné části vlny, kterou lze určit snadno. Pro počet celých vln se používá termín celočíselná nejednoznačnost. Lze určit při následném zpracování, ale i v reálném čase. Nejprve se určí počáteční celočíselná nejednoznačnost, ke které se následně přičítají změny. Pokud ovšem dojde ke ztrátě signálu, je třeba určit novou počáteční celočíselnou nejednoznačnost, díky čemuž dochází ke ztrátě návaznosti a tzv. fázovému skoku. Celková přesnost je řádově vyšší než u kódového měření (až milimetry).
Poslední princip se využívá především k určení rychlosti pohybu přijímače. Jde o Dopplerovské měření. Využívá principu Dopplerovského posunu. V tomto případě se využívá změny frekvence přijímaného signálu díky relativnímu pohybu družice vůči přijímači. Tyto změny se zaznamenají a následně slouží k výpočtu rozdílů vzdáleností a k určení polohy(18).
V současné době jsou celosvětově, již alespoň částečně, v provozu již tři globální polohovací systémy, GPS/NAVSTAR provozovaný armádou USA, GLONASS, který je oficiálně civilní, ale ve skutečnosti je také velmi závislý na armádním rozpočtu, tentokráte Ruské federace a konečně evropský Galileo, který je zatím spíše příslibem do budoucna.
3.1.3. Výkonnost
Výkonnost systému GPS je ovlivněna řadou dílčích faktorů. Nejdůležitějším faktorem je přesnost. Díky různým chybám vzniká odchylka, která označuje rozdíl mezi naměřenou a správnou hodnotou. Tyto chyby mohou být buď náhodné, nebo systematické a vrátíme se k nim později. Dalším faktorem je dostupnost signálů, kterou ovlivňují technické parametry systému, v globálním měřítku je stanovena dostupnost na 99,85 % času, ale i vlivy prostředí. Velmi nízká dostupnost je v hustě zalesněných, či zastavěných oblastech, obecně s omezeným výhledem na oblohu. Zapomenout nesmíme ani na kvalitu přijímače. Důležitým faktorem je rovněž integrita signálů, pod kterou by se dala zahrnout věrohodnost a spolehlivost signálů. Je třeba zajistit kontrolní mechanizmy (zabudované v družicích a v řídící stanici), které v případě výskytu anomálie spustí mechanizmus vedoucí k označení nezdravé družice. Její signál tudíž nebude dále používán pro výpočet polohy. Kontinuita signálů znamená nepřetržitý provoz v průběhu dané operace a může být narušena plánovanou údržbou, ale i náhodnými poruchami, které mohou vést ke zhoršení kvality, či úplnému výpadku služeb. Lokálně může dojít i k interferenci signálů zapříčiněné příjmem více signálů se stejnou, či velmi podobnou frekvencí, širokopásmovým šumem vznikajícím v okolí výkonných elektrických zařízení a v neposlední řadě i záměrným rušením(18).
3.2. Faktory ovlivňující přesnost GNSS
Důležitou skupinou jsou faktory ovlivňující přesnost systému GPS, která se může pohybovat řádově od stovek metrů až po několik centimetrů.
V první řadě se jedná o faktory, které má možnost ovlivnit uživatel. Pro dosažení nejlepších možných výsledků je důležitou fází příprava měření během, které může uživatel ovlivnit hned několik faktorů působících na přesnost měření. Jedním z nich je platnost efemerid (drah družic). Aktuální stav si uživatel může stáhnout v rámci almanachu, který je možné průběžně aktualizovat. Aktuální almanach v GPS přijímači přispívá i ke snížení TIFF (Time to First Fix), což je doba od zapnutí přijímače k prvnímu učení aktuální polohy. S platností efemerid souvisí i jejich přesnost, ta je ale plně v režii obsluhy řídícího segmentu GPS. Pomocí mnoha programů, lze využít aktuální efemeridy pro ovlivnění dalších faktorů. Počet viditelných družic a jejich geometrické uspořádání se mění v závislosti na čase, tudíž je důležitá vhodná volba časového úseku měření. Minimální počet družic pro určení 3D polohy jsou čtyři, což je dáno nepřesnými hodinami v přijímači, díky nimž je brán čas jako další neznámá. Větší počet družic, ale přispěje ke zpřesnění polohy. Přesnost významně ovlivňuje i geometrické uspořádání družic použitých pro výpočet. Ideální rozmístění pro čtyři družice je jedna v nadhlavníku a zbylé tři 15° až 20° nad obzorem a 120° od sebe. Pro vyjádření se používá parametr nazvaný snížení přesnosti se zkratkou DOP (Dilution of Precision), který má několik parametrů: relativní - RDOP, horizontální - HDOP, vertikální - VDOP, časový - TDOP a polohový - PDOP, který je nejpoužívanější. Pokud je hodnota PDOP 4 a menší, tak je uspořádání družic vhodné pro přesné měření. Hodnoty 5 - 7 označují uspořádání, které lze ještě akceptovat. Pokud ale PDOP dosáhne hodnoty 8 a vyšší indikuje to špatné uspořádání družic. Příklad hodnot PDOP je zobrazen na následujícím obrázku (obr. 1).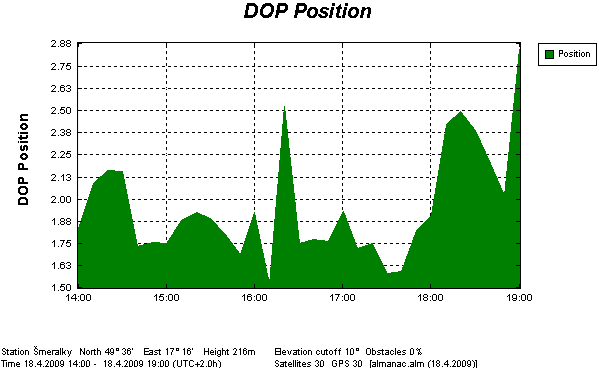
Obr. 1 Proměnlivost PDOP zobrazená v programu Trimble Planning (zdroj: vlastní zpracování)
Faktorem, který může uživatel ovlivnit je i typ použitého přijímače. Ty se dělí podle způsobu užití, způsobu měření a počtu současně sledovaných družic. Nejnákladnější a nejdražší se používají pro kosmickou navigaci. Dalším typem jsou přijímače pro leteckou navigaci umožňující i automatické přistávání. Dále pro lodní navigaci a velká škála ručních přijímačů (pro mapování a navigaci, či měřické a referenční přijímače). Vlastní kategorií jsou externí moduly. Způsob měření souvisí s příjmem dálkoměrných kódů či fázových měření. Oba druhy přijímačů mohou být jednofrekvenční, pracují pouze s L1 frekvencí nebo dvoufrekvenční, které přidávají příjem frekvence L2(18).
Prvním mezi faktory, které může člověk ovlivnit pouze z části je poměr signál/šum. Zmíněný šum roste, pokud průchodu signálů z družic brání např. velká vrstva nabitých částic ionosféry nebo vodních par troposféry, následně dochází ke zpomalení rychlosti šíření radiových signálů(13). Další překážkou mohou být například koruny stromů. Pokud se uživatel nachází v prostředí s vysokou odrazivostí, dochází k vícecestnému šíření. Anténa přijímače nepřijímá pouze přímý signál z družice, ale i nepřímý signál vzniklý odrazem. Díky tomu dochází ke špatnému vyhodnocení zdánlivé vzdálenosti mezi družicí a přijímačem a tudíž ke snížení přesnosti polohy až o několik metrů. Poslední dva zmíněné faktory snižující přesnost lze částečně eliminovat, pokud vyřadíme z měření družice, které jsou níže než 15° nad obzorem(18).
Další na řadě jsou faktory, které může ovlivnit pouze provozovatel systému GPS. Prvním je stav družic. Navigační zpráva, kterou družice vysílají, obsahuje i informace o jejich stavu. Pokud se družice odchýlí od svého směru nebo z nějakého důvodu vysílá chybná data, může být dočasně označena jako nezdravá. Během trvání tohoto stavu dochází k ‚opravě' a přijímače ji nezahrnují do svých výpočtů. Pod přímou kontrolu provozovatele GPS patří Selektivní dostupnost (SA) a Anti-Spoofing (A-S).
Selektivní dostupností se označuje záměrné zavádění předem definovaných proměnlivých chyb do efemerid vysílaných družicemi nebo zavádění fluktuací frekvence hodin na družicích. Toto opatření sníží horizontální přesnost uřčení polohy až na 100 m. Vliv SA lze při znalosti speciálního dešifrovacího kódu potlačit. Tento kód má k dispozici armáda USA a spřátelené organizace. Selektivní dostupnost byla definitivně deaktivována v roce 2000.
Druhou metodou ovlivňující vysílaný signál družic je Anti-Spoofing. Jedná se o šifrování části signálu tzv. P-kódu, který je poté označován jako Y-kód. Tímto dochází k ochraně proti manipulaci se signálem GPS a jeho napodobování. K aktivaci A-S došlo v roce 1994, od té doby dochází pouze ke krátkodobým vypnutím(18).
3.3. Metody zpřesnění polohy GPS
Stejně jako existuje mnoho faktorů, které přesnost snižují, existuje i mnoho metod pro zpřesnění. Některé z nich se obejdou bez přídavných zařízení. Typickým zástupcem této metody je průměrování. Princip je založen na opakovaném měření na jednom bodě. Z toho pramení i hlavní nevýhoda, a sice nemožnost použití při pohybu.
Další možností pro zpřesnění je využití pseudodružic. Jedná se o pozemní vysílač, který se jeví jako další družice a díky tomu dochází k příjmu většího množství dat a poloha je tudíž přesnější. Využívají se především na letištích nebo v přístavech, ale všeobecně nejsou moc rozšířeny také díky vysoké pořizovací ceně a nutnosti přímé viditelnosti družice. Koncepce výstavby je řešena dvěma způsoby. Buď jako samotný vysílač imitující družici GPS a vysílající nepřetržitě, jehož výrova již v dnešní době není nikterak složitá. Nebo jako spojení vysílače s referenční stanicí. V tomto případě vysílač většinou nevysílá kontinuálně nýbrž přerušovaně podle pseudonáhodného schématu. Do zvláštní kategorie lze zařadit funkci RAIM, která umožňuje během několika sekund identifikovat vadnou družici, což je třeba v leteckém provozu velmi důležité(18).
Do skupiny metod, které vyžadují dodatečné vybavení, patří Diferenční GPS (DGPS). Důvod pro použití DGPS je mnohem vyšší přesnost určení polohy. Dokáže totiž eliminovat většinu rušivých přírodních i systémových chyb, které jsme uvedli výše, včetně selektivní dostupnosti. Základní princip spočívá v použití dvou přijímačů. Jeden přijímač používá uživatel v terénu a druhý (může jich být i více) tvoří referenční stanici. Referenční stanice je tedy nepřemístitelný GPS přijímač s přesně zaměřenou polohou a výhledem na všechny viditelné družice (až 12 z jednoho systému). Neustále přijímá informace ze všech družic, porovnává je se správnou vzdáleností družic a počítá odchylku vzdálenosti, kterou přímo odesílá na speciální přijímač uživatelské GPS (např. GSM/UMTS modul) a zároveň ukládá do archivu pro pozdější použití - postprocessing(18). Referenční stanice nepočítá kvůli časové náročnosti přímo polohové korekce, ale jen odchylky ve vzdálenostech jednotlivých družic. Díky použití mezinárodního standartu RTCM SC-104 (Radio Technical Commission for Maritime - Special Committee 104) může uživatel využívat jedno zařízení pro příjem korekcí ze všech referenčních stanic, které má v dosahu(13).
Na území Česka jsou od sebe permanentní (referenční) stanice umístěny ve vzdálenosti zhruba 60 km a tvoří kompletní síť s názvem CZEPOS (Česká síť permanentních stanic pro určování polohy) provozovaná Zeměměřičským úřadem. Celkem se skládá z 26 stanic ve vzdálenostech zhruba 60 km a výstavba trvala zhruba jeden a půl roku, od poloviny r. 2004 do konce 2005. Observace GPS se provádí nepřetržitě, každou vteřinu dochází k zápisu a v centru CZEPOS k průběžnému zpracovávání a následnému poskytování uživatelům. Kromě služeb v reálném čase (DGPS, RTK, …) je zde možnost stažení datových produktů až po skončení měření - postprocessing. V tomto případě jsou data generována serverem ve formátu RINEX (Receiver Independent Exchange). Tímto způsobem lze zpřesnit data získaná s jednofrekvenční aparaturou a dosáhnout tak přesnosti do 10 cm. S dvoufrekvenční aparaturou může být konečná přesnost až v řádu milimetrů. Speciální službou je tzv. síťový RINEX. Jde o službu, při níž jsou data generována pro virtuální stanici o souřadnicích zvolených uživatelem ze všech referenčních stanic na základě síťového řešení. Díky této metodě jsou výsledná korekční data přesnější než z jednotlivých stanic(14), (19), (21).
Obr. 2 Logo CZEPOS